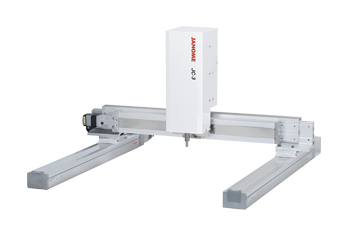
Roboty kartezjańskie to rodzaj robotów przemysłowych, które poruszają się wzdłuż prostopadłych osi (X, Y, Z, R) w układzie współrzędnych kartezjańskich. Dzięki temu ich ruchy są prostoliniowe i łatwe do kontrolowania.
Funkcje:
Wszystko w jednym
Wielofunkcyjny robot kartezjański serii JC-3 jest dostarczany w komplecie z łatwym w użyciu dedykowanym kontrolerem i jednostką robota z bogatym wyborem długości skoku dla każdej osi.
Podobnie jak nasze roboty stacjonarne, JC-3 ma wygodne ustawienia instalacji. Nauczanie programu jest łatwe; dzięki interaktywnemu zawieszce do nauki metod nie ma potrzeby skomplikowanych ustawień.
Idealny jako robot dozujący w linii lub dokręcający śruby
Nasze specjalistyczne oprogramowanie Screw Tightening Specification i Dispensing Specification znacznie skraca czas ustawiania programu. Oferujemy również niezwykle wszechstronne oprogramowanie Standard Specification.
Używa odpowiednich silników, aby spełnić Twoje potrzeby
Seria JC-3 wykorzystuje silniki krokowe ze sprzężeniem zwrotnym na osiach X i Y do przenoszenia ładunku do 8 kg, z maksymalnym przyspieszeniem 5000 mm/s2 i maksymalną prędkością 800 mm/s.
Kompleksowe interfejsy
Port Ethernet (LAN) i 3 porty COM (RS2323C) są standardowym wyposażeniem. Zainstaluj opcjonalny port sieciowy (dostępne typy: CC-Link, DeviceNet, PROFIBUS, EtherNet/IP, PROFINET i CANopen).
Możesz nie tylko określić numer programu i uruchomić go z PLC, ale także określić współrzędne położenia i przesunąć osie robota, a także przepisać współrzędne położenia w istniejących programach.
Wysoka kompatybilność z instalacją systemu wizyjnego
Ulepszone funkcje kamery, aby sprostać potrzebom zakładów montażowych dążących do większej precyzji.
Oprócz naszej przydatnej funkcji korekcji położenia dodaliśmy funkcje, takie jak funkcja automatycznej kalibracji i funkcja regulacji kamery CCD.
Steruj maksymalnie 2 silnikami zewnętrznymi za pomocą funkcji osi pomocniczej (opcjonalnie)
Naucz i steruj maksymalnie 2 urządzeniami zewnętrznymi „typu wejścia ciągu impulsów” napędzanymi silnikiem krokowym lub serwomotorem z pilota edukacyjnego wraz z osiami robota. Funkcja ta ma wiele zastosowań, np. dodanie stołu obrotowego w celu zmiany kierunku obrabianego przedmiotu lub skonfigurowanie i sterowanie przenośnikiem z poziomu robota itp.
Łatwe nauczanie programu
Dzięki naszemu dedykowanemu oprogramowaniu aplikacyjnemu nauczanie jest łatwe zarówno w przypadku „Specyfikacji dokręcania śrub”, jak i „Specyfikacji dozowania”. Twórz dane nauczania na podstawie plików DXF lub danych Gerber za pomocą oprogramowania komputerowego „JR C-Points II”.
Oferujemy opcjonalny wiszący panel nauczania do nauczania za pomocą ruchu JOG.
Wiszący panel nauczania obsługuje 11 różnych języków wyświetlania
Aby pomóc personelowi z różnych krajów obsługiwać robota, wbudowaliśmy następujące języki wyświetlania wiszących paneli nauczania: angielski, japoński, francuski, hiszpański, włoski, niemiecki, koreański, chiński uproszczony, chiński tradycyjny, czeski i wietnamski.
Brak konieczności ruchu powrotnego (model enkodera absolutnego) (*1)
Korzystając z enkodera, robot zapamiętuje swoją bieżącą pozycję. Ruchy powrotne między przebiegami programu są zbędne.
(*1) Model enkodera absolutnego jest dostępny tylko dla typów 3 osi.
Oprogramowanie systemowe:
– nasze oryginalne oprogramowanie systemowe jest przyjazne dla użytkowników zarówno początkujących, jak i doświadczonych, a robot jest już zainstalowany w robocie.
Nasze oprogramowanie dedykowane do konkretnych zastosowań sprawia, że nauka obsługi robotów jest łatwa nawet dla nowych użytkowników. Rozszerzyliśmy naszą grupę poleceń, aby zapewnić Ci szerszy wybór poleceń.
Automatyczna kalibracja kamery
Dobra wiadomość dla klientów, którzy chcą używać systemu wizyjnego do regulacji położenia! Kalibracja kamery, kiedyś czasochłonny proces dopasowywania współrzędnych kamery do współrzędnych robota, jest teraz o wiele łatwiejsza. Wystarczy zarejestrować znaki kalibracji po stronie kamery, a robot skalibruje się automatycznie.
Kompatybilne kamery (*2)
Panasonic A110・A210、PV200・PV260・PV300・PV500
Keyence CV3000・CV-X100・CV-X200・CV-X400、XG-8000・Seria XG-X
Seria OMRON FH・Seria FQ
(*2) Niektóre modele kamer zostały wycofane ze sprzedaży. Aby uzyskać szczegółowe informacje, skontaktuj się z nami.
Funkcja regulacji kamery CCD z licznikiem
Ulepszyliśmy funkcje dla zadań wykonywanych podczas korzystania z kamery w celu dokonania regulacji położenia. Robot może wykonać do 3000 regulacji położenia, więc w przypadku elementów obrabianych ułożonych na palecie zamiast powtarzać proces przechwytywania obrazu, a następnie wykonywania zadania po jednym elemencie na raz, możesz przechwycić partię kolejnych obrazów, a następnie wykonać partię zadań sekwencyjnie i znacznie skrócić całkowity czas taktu.
Wspólne ustawienia dla wszystkich programów
Ustawienia takie jak „praca w domu”, „limit obszaru ruchu”, „warunki ruchu PTP” itd., które są takie same dla wszystkich programów, można teraz ustawić jako wspólne. Wprowadzenie tych ustawień raz dla wszystkich programów pomaga skrócić czas nauczania programu. Oczywiście, możesz przełączać te ustawienia, aby ustawić je indywidualnie, jeśli chcesz.
Funkcja 4-osiowego dopasowywania igieł
Robot rejestruje położenie końcówki dyszy dozownika, więc jeśli podczas wymiany igły wystąpi rozbieżność położenia, robot używa funkcji „Dopasowywania igieł”, aby określić wielkość przemieszczenia i wyregulować położenie końcówki dyszy, umożliwiając dozownikowi dozowanie w taki sam sposób, jak przed wymianą igły. Oprócz naszego typu 3-osiowego ta funkcja działa teraz również w przypadku naszych typów 4-osiowych. Zdecydowanie zalecamy to klientom, gdy regulacja położenia dyszy po wymianie igły jest uciążliwa.
Historia błędów
Na wyświetlaczu pojawiają się godziny i daty błędów.
Robot określa czas wystąpienia błędu, pomagając zidentyfikować przyczynę.
Historia błędów zapisuje dane dla 1000 ostatnich błędów.
Prosta funkcja PLC
Wbudowany prosty sekwencer pozwala robotowi na łatwą koordynację z urządzeniami zewnętrznymi. (Maksymalna pojemność 100 programów z 1000 krokami na program.)
Dostosowywanie funkcji
Utwórz własne specjalistyczne oprogramowanie, rejestrując polecenia, których często używasz w danych swojego zadania punktowego.
Oprogramowanie komputerowe „JR C-PointsⅡ” (opcjonalnie)
Nasze oryginalne interaktywne oprogramowanie programistyczne „JR C-Points II” umożliwia tworzenie, edycję i zapisywanie danych dydaktycznych i dostosowywania na komputerze.
Wycinaj i wklejaj dane punktowe w sposób typowy dla arkuszy kalkulacyjnych, ustawiaj punkty za pomocą wprowadzania liczbowego oraz twórz i edytuj polecenia zadań punktowych bez żadnych trudności. Ponadto dzięki funkcji „Point Graphic Editing Function” twórz i edytuj dane ścieżki jako rysunek graficzny, aby jeszcze bardziej ułatwić nauczanie programu.
Konwertuj dane dydaktyczne „JR C-Points” na dane „JR C-Points II” i używaj.
Nauczanie za pomocą kamery USB
Precyzyjne nauczanie jest łatwe! Podłącz kamerę USB* i ustaw punkty za pomocą powiększonych obrazów na ekranie komputera, kliknij ikony ruchów, które chcesz.
*Aby uzyskać informacje o zgodnych kamerach USB, skontaktuj się z nami.
Funkcja edycji grafiki punktowej
Na podstawie importowanych danych obrazu tła (jpg), danych DXF lub Gerber, rysuj punkty, linie proste, okręgi i łuki. Dzięki automatycznemu podejściu możesz precyzyjnie określić nawet trudne pozycje na swoim komputerze.
Sortowanie według określonej funkcji kierunku
Podczas korzystania z programów z wieloma ścieżkami skróć czas cyklu dzięki funkcji, która ponownie wyrównuje ścieżki na podstawie kolejności punktów początkowych.
Funkcja automatycznego rysowania łuku
Edycja okręgu jest jeszcze łatwiejsza dzięki funkcji ustawiania osi R według kąta promienia.
Aplikacje programowe
Oprogramowanie dedykowane do dokręcania śrub i dozowania.
Specyfikacje dokręcania śrub
Tworzenie programów dokręcania śrub jest proste: wystarczy ustawić pozycje robocze dla parametrów dokręcania śrub, takich jak skok śruby, długość i obroty na minutę.
Łatwe jest nie tylko pełne dokręcanie śrub, ale także nauka luzowania śrub i częściowego (luźnego) dokręcania śrub.
(Operacje luzowania wymagają koordynacji ze strony wkrętaka.)
Funkcja wykrywania błędów dokręcania śrub
Specjalistyczne oprogramowanie do dokręcania śrub oferuje przydatne funkcje, w tym wykrywanie „Early Finish” dla pływających łbów śrub i wykrywanie „No Finish Signal” dla śrub, które obracają się w otworze bez dokręcania, a także funkcję zatrzymywania robota, gdy podajnik śrub jest pusty.
Specyfikacje dozowania
Tworzenie programów dozowania jest proste: wystarczy ustawić pozycje pracy dla parametrów dozowania, takich jak dozowanie punktowe lub dozowanie liniowe.
Funkcja dozowania z wypełnieniem
Wygodne funkcje dozowania z wypełnieniem pozwalają na dozowanie jak rysowanie obrazu, używając tylko 2 punktów dla prostokąta i 3 punktów dla koła.
Funkcja oczyszczania
Umożliw robotowi oczyszczanie w powtarzającym się cyklu, gdy znajduje się w pozycji roboczej. Ponadto, możesz opróżnić dozowany płyn, kiedy tylko chcesz, używając opcjonalnego „Przełącznika oczyszczania”.
Zapobieganie fragmentacji dozowania
Ustaw czasy oczekiwania, aby zapobiec fragmentacji dozowania na początku i rozpylaniu na końcu przebiegów dozowania.
 Kosmetyki
Kosmetyki Farmacja i suplementy diety
Farmacja i suplementy diety Dodatki do żywności
Dodatki do żywności Kleje przemysłowe
Kleje przemysłowe Guma i tworzywa sztuczne
Guma i tworzywa sztuczne Maszyny i materiały do elektroniki
Maszyny i materiały do elektroniki Środki smarne
Środki smarne Chemia gospodarcza i agrochemia
Chemia gospodarcza i agrochemia Oczyszczanie ścieków przemysłowych
Oczyszczanie ścieków przemysłowych Powłoki malarskie i kleje
Powłoki malarskie i kleje