- Oferta
 Kosmetyki
Kosmetyki Farmacja i suplementy diety
Farmacja i suplementy diety Dodatki do żywności
Dodatki do żywności Kleje przemysłowe
Kleje przemysłowe Guma i tworzywa sztuczne
Guma i tworzywa sztuczne Maszyny i materiały do elektroniki
Maszyny i materiały do elektroniki- Maszyny do Lutowania
- Maszyny do Testowania Elektroniki
- Maszyny do Mycia PCB
- Maszyny do Montażu SMD
- Maszyny do Dozowania i lakierowania elektroniki
- Maszyny do Automatyzacji
- Maszyny do Depanelizacji PCB
- Maszyny Specjalne
- Liczarki komponentów SMD
- Materiały do Lutowania
- Materiały do Mycia PCB ESD
- Materiały do Zabezpieczania Elektroniki
 Środki smarne
Środki smarne Chemia gospodarcza i agrochemia
Chemia gospodarcza i agrochemia Oczyszczanie ścieków przemysłowych
Oczyszczanie ścieków przemysłowych Powłoki malarskie i kleje
Powłoki malarskie i kleje
- Aktualności
- O nas
- Współpraca
- Kontakt
Strona główna » Maszyny i materiały do elektroniki » Maszyny do Automatyzacji » Roboty typu „gantry”
Kategorie
Filtry
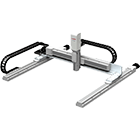
Roboty typu „gantry”
Robot typu gantry to nowoczesne, portalowe rozwiązania automatyzacyjne, które sprawdzą się w aplikacjach wymagających dużej przestrzeni roboczej i dużej nośności. Nasze roboty gantry charakteryzują się:
- Dużym zakresem ruchu: Dzięki konstrukcji w formie portalu, idealnie nadają się do prac na dużych powierzchniach.
- Wysoką precyzją i stabilnością: Zapewniają dokładne wykonywanie zadań nawet przy obsłudze ciężkich ładunków.
- Elastycznością zastosowania: Możliwość integracji z różnymi systemami produkcyjnymi pozwala na dostosowanie do specyficznych potrzeb klienta.
- Optymalizacją procesów produkcyjnych: Automatyzacja prac w dużych przestrzeniach wpływa na zwiększenie efektywności i redukcję kosztów operacyjnych.
Zapraszamy do zapoznania się z naszą ofertą robotów typu gantry – rozwiązaniem, które podniesie wydajność Twojej firmy i umożliwi realizację najbardziej wymagających projektów.

C.H. Erbslöh Polska Sp. z o.o.
jest profesjonalnym doradcą technologicznym i dystrybutorem robotów typu gantry producenta
Janome Industrial Equipment
| Produkt | Skrócony opis | Grupa produktów | ||
|---|---|---|---|---|
 | Robot gantry JC-3D12-4W3 - Long Stroke Model | Obsługuje nawet duże elementy, umożliwiając wykonywanie precyzyjnych operacji płynnie i równomiernie na dużym obszarze roboczym. | Roboty typu „gantry” | Więcej Zapytaj |
Strona 1
Masz pytania?
Skontaktuj się z nami
Maszyny i materiały do elektroniki
Materiały do elektroniki
|
Jerzy Ziółkowski +48 606-893-910 |
Rafał Przegaliński +48 605-548-484 |
Maszyny i urządzenia
|
Aleksander Jaświec +48 603-411-677 |
Tomasz Bińkowski +48 609-743-474 |